Neal-field Acoustic Manipulation
Harnessing the nonlinear response from squeezing a thin air film to generate substantial levitation force for non-contact manipulation.
Non-contact actuators are promising technologies in metrology, machine-tools, and hovercars, but have been suffering from low energy efficiency, complex design, and low controllability. This research explores the possibility to use near-field acoustic force to levitate and drive objects with only mechanical vibration.
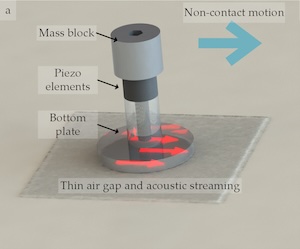
The levitation is achieved by creating a stable air film using near-field acoustic force; while the non-contact driving is realized by controlling the pressure distribution within the air film using coupled resonant mode. We have demonstrated the prototypes in surface actuators (2D) (Chen et al., 2016) (missing reference) and a non-contact spindle (Guo & Gao, 2018).
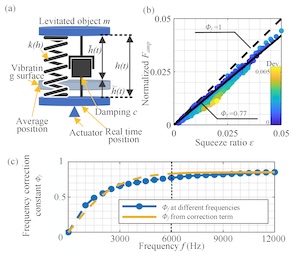
We also studied the dynamic characteristics of near field levitation bearings. Through theoretical analysis, two different types of system stiffness are defined and derived analytically. The dynamic stiffness relates the excitation amplitude to the dynamic force amplitude, while the effective stiffness governs the time-averaged force–displacement relationship. The results indicate two non-linear and asymmetric spring constants that can effectively predict levitation force and height (Wang & Guo, 2021).
The potential applications of near field acoustic levaition and manipualtion are in precision machine tools, non-contact handling, and other applications where a non-contact manipulation is needed.




References
2021
-
 Applied Physics Letters, Oct 2021
Applied Physics Letters, Oct 2021

2018

2016
-
 Applied Physics Letters, Oct 2016
Applied Physics Letters, Oct 2016
