ROBOT x Manufacturing
Large scale surface patterning of micro-structured functional surfaces using a cohort of robots.
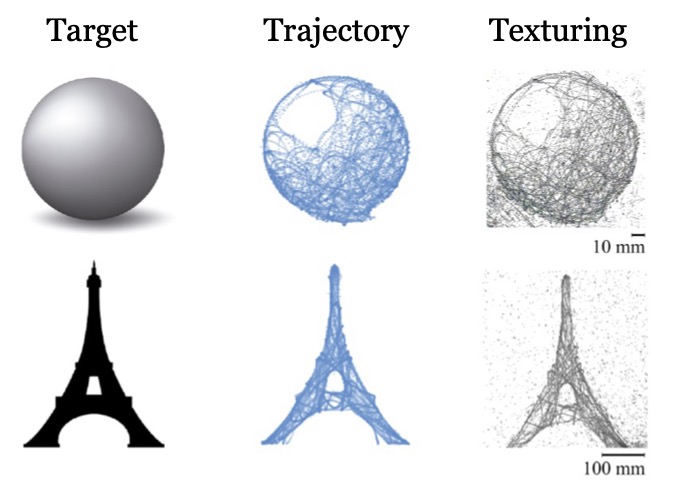
Micro-structured surfaces possess useful properties such as friction modification, anti-fouling, and hydrophobicity. However, manufacturing these surfaces in an affordable, scalable, and efficient manner remains challenging. Standard coverage methods for surface patterning require precise placement of micro-scale features over meter-scale surfaces with expensive tooling for support. In this work, we address the scalability challenge in surface patterning by designing a mobile robot with a credit-card-sized footprint to generate micro-scale divots using a modulated tool tip. We provide a control architecture with a target feature density to specify surface coverage, eliminating the dependence on individual indentation locations. Our robot produces high-fidelity surface patterns and achieves automatic coverage of a surface from sophisticated target images. We validate an exemplary application of such micro-structured surfaces by controlling the friction coefficients at different locations according to the density of indentations. These results show the potential for compact robots to perform scalable manufacturing of functional surfaces, switching the focus from precision machines to small-footprint devices tasked with matching only the density of features (Taylor et al., 2024; Landis et al., 2025).
(in collaboration with Prof. Todd Murphey)

References
2025
-
 CIRP Annals, Oct 2025
CIRP Annals, Oct 2025

2024
-
 In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , Oct 2024
In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , Oct 2024
